
Ultra-high speed data
In a unique dyno test series MXScandinavia on Thumper Talk dyno tested two shim stack configurations and also obtained direct shim stack deflection measurements using a finger press.
A finger press inserts metal rods through the valve ports to directly measure the force required to produce a specific deflection. The MXScandinavia data shows the stiffness of the shim stack is nonlinear and the nonlinear behavior increases with stack lift. Nonlinear stiffness is one reason why the shim factor linear stiffness theory performs poorly in scaling shim stacks.
Shim ReStackor analysis of the tested shim configurations closely follows the nonlinear finger press stiffness data and the damping force data up to the dyno velocity limit of 120 in/sec. At 120 in/sec the shim stack edge lift was 0.02 inches, approximately one third of the finger press test range.
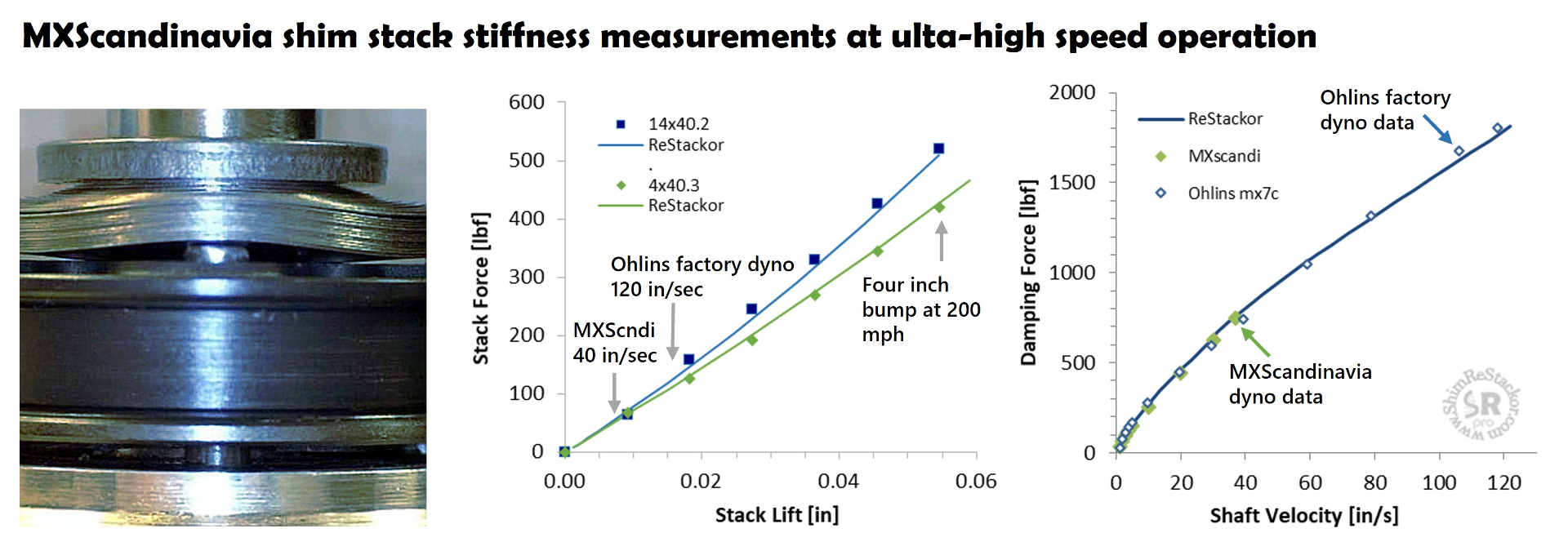
The finger press measured stack deflections well beyond the dyno test limit up to deflections of 0.06 inches equivalent to hitting a four inch bump at 200 mph.
The finger press data verifies Shim ReStackor shim stack stiffness calculations, verifies the nonlinear stiffness behavior of shim stacks at high deflections and gives confidence applying Shim ReStackor calculations at extreme conditions well beyond the limits of conventional dyno testing.
Crossover tuning
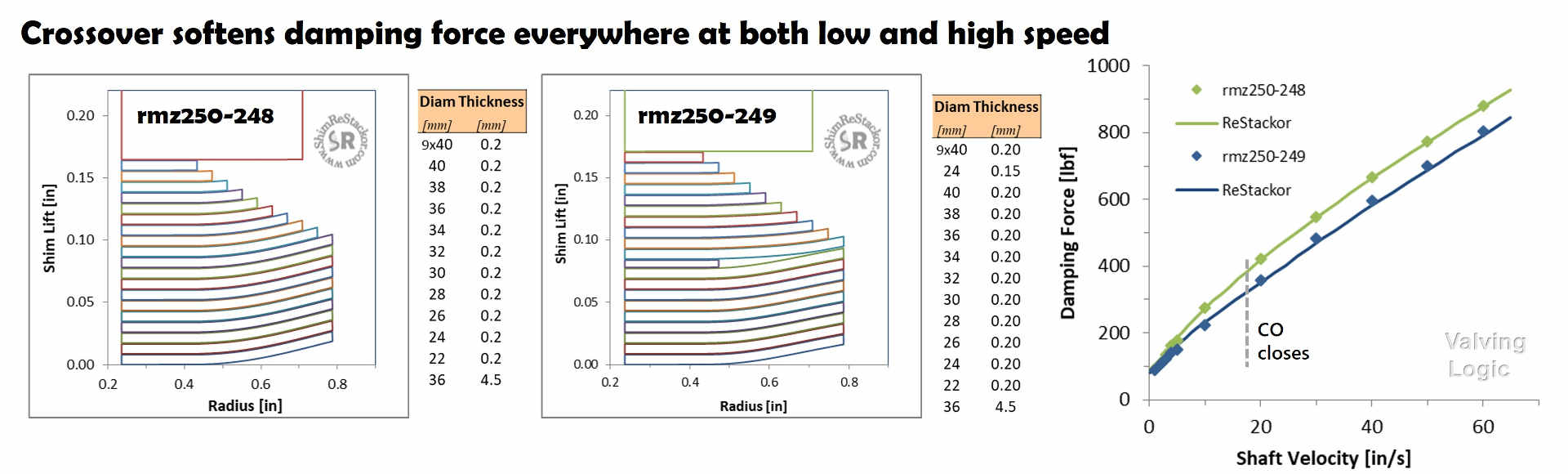
Valving Logic demonstrated the effect of adding a crossover to a simple tapered shim stack. Adding the crossover makes the damping force softer everywhere, not just at low speed.
Tuning crossovers to produce the single effect of softer low speed damping requires multiple changes to the shim stack:
- Adjust the crossover position
- Adjust the crossover diameter to produce the desired low speed damping
- Adjust crossover gap to produce the desired closure velocity
- Adjust the high speed stack to produce the desired high speed damping
There is no algebraic equation to “design” a crossover. Crossovers are tuned by hacking around on each of the above four parameters to hit the desired ow damping target while maintain the same high speed damping. That is a tedious process on a dyno, but rapid Shim ReStackor calculations make the process easy.
Tuning crossovers to hit a damping target requires multiple simultaneous changes to obtain the single result of softer low speed damping. Multiple simultaneous changes frustrates many tuners committed to the “one thing at a time” approach to tuning.
Faux crossover gap
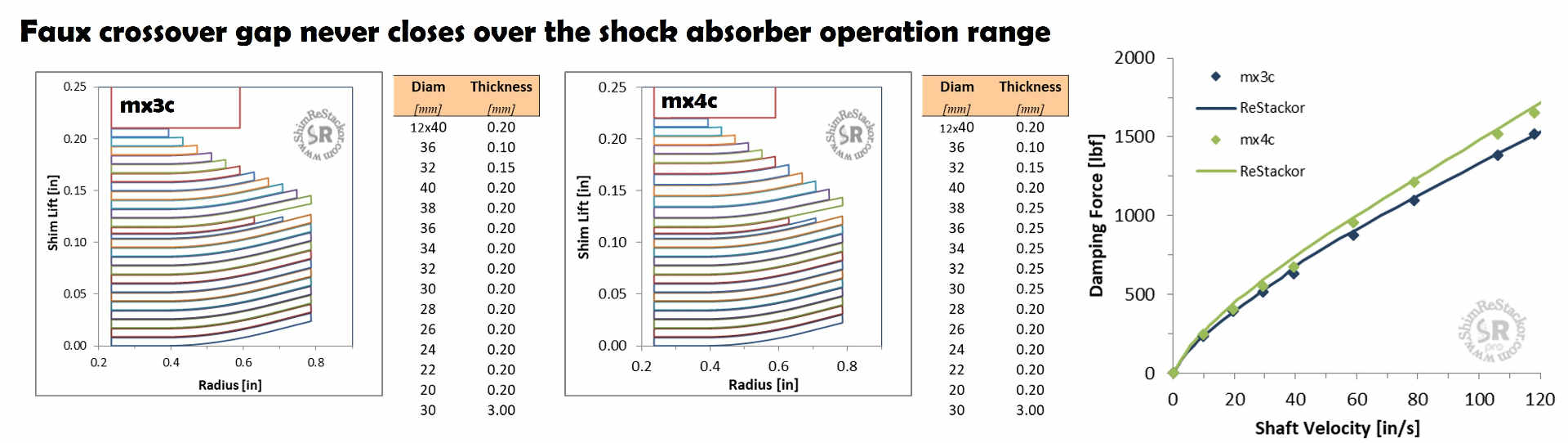
A faux crossover gap never closes. Faux gaps are created by large crossover shim diameters, stiff low speed stacks or soft high speed stacks that do not produce enough force to close the crossover gap. MXScandinavia provides dyno test examples of faux crossovers.
In dyno testing, faux crossovers behave like a interactive crossover. Changes to the low or high speed stack changes the damping force leading many dyno tuners to believe the crossover gap is active.
However, the crossover gap height never changes as the shim stack deflects. The crossover shims could be moved further up in the stack forming a simple tapered shim stack with the same damping force.
In dyno testing, there is no way to know the crossover gap is faux until the shock is pushed to high enough speed to observe the crossover closing. Soft closures of interactive crossovers make those events difficult to spot in damping force data.
Interactive crossover rm85
Interactive crossovers use a shim diameter that is larger than the shim stack clamp. The larger crossover diameter transfers force from the face shims directly into the high speed stack forcing the high speed stack to deflect before the crossover closes. Interaction with the high speed stack softens the crossover closure event (linky sample apps).
Valving Logic on Thumper Talk demonstrated the performance of an interactive crossover. The damping force data shows no evidence of the crossover closing. However, Shim ReStackor calculations of the shim stack deflection and stack flow area make it easy to spot the crossover closure velocity at 20 in/sec.
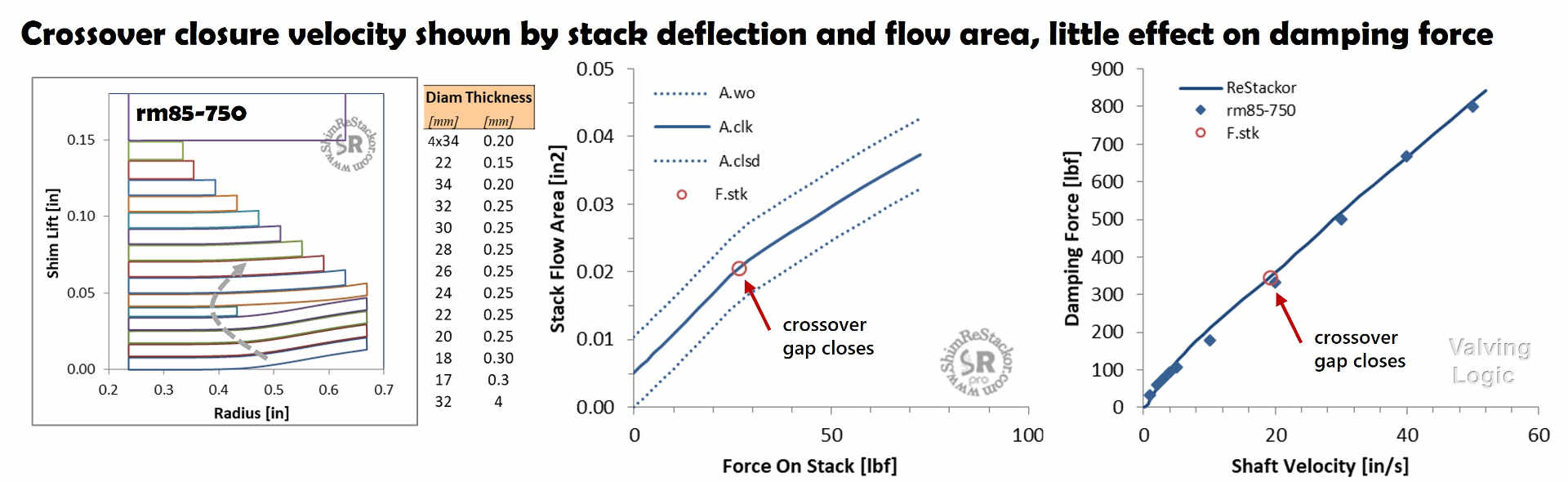
Soft closures of interactive crossover with a soft high speed stack often do not produce any specific “event” in the damping force curve. The data at 20 in/sec where the crossover closes shows that.